ربات هاي برتر دنيا
بيست و سوم آذر ماه سال 98 در حضور معاونت علمي و فناوري رياست جمهوري آقاي سورنا ستاري، از چهارمين نسل از ربات انسان نماي ايران با نام سورنا 4 رونمايي شد. اين ربات كه اخيرا توسط انجمن مهندسين مكانيك آمريكا (ASME) به عنوان يكي از ده ربات انسان نماي برتر در سال 2020 ميلادي شناخته شده است؛ در همان سال 98 نيز به واسطه انجمن بين المللي مهندسين برق و الكترونيك (IEEE) توجه رسانه ها را به خود جلب كرده بود.
عقيل يوسفي كما، مجري طرح سورنا ۴، در حاشيه مراسم رونمايي از اين ربات گفته بود: نرم افزار سورنا ۴ به گونه اي نوشته شده تا افرادي كه تا حدودي با فناوري رباتيك آشنا هستند، بتوانند براي آن برنامه نويسي كنند.
او همچنين بر موضوع تجاري سازي اين ربات تاكيد كرد و گفت: درصورتي كه تكنولوژي هاي مشابه سورنا ۴ وارد عرصه زندگي مردم نشوند، به نتيجه اي كه از آن انتظار مي رود دست نيافته ايم.
طبق گفته معاون تجاري سازي و نوآوري معاونت علمي رياست جمهوري آقاي پيمان صالحي، اين پروژه مجموعا ۵/۳ ميليارد تومان هزينه در بر داشته است.
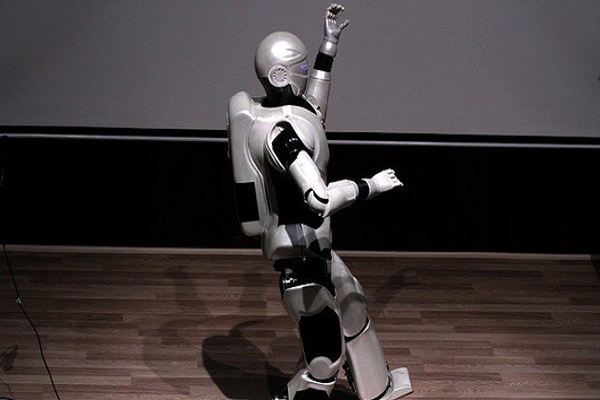
ربات انسان نما
نخستين ربات انسان نماي سورنا در سال ۱۳۸۷ با ۸ درجه آزادي و نسل دوم آن در سال ۱۳۸۹ با ۲۲ درجه آزادي طراحي و ساخته شده است.
در مقايسه با نسل سوم اين ربات كه ۳۱ درجه آزادي دارد و در سال ۱۳۹۴ رونمايي شده است، ربات سورنا ۴ داراي ۴۳ درجه آزادي است. همچنين با بهبود طراحي دست ربات، قابليت گيرش اجسام مختلف با اشكال مختلف براي اين ربات فراهم شده است.
ربات سورنا ۴ همچنين با طراحي بهينه ي سازه ربات، بومي سازي طراحي و استفاده از فناوري چاپ سه بعدي، با قد ۷/۱ متر و وزن ۶۸ كيلوگرم در مقايسه با نسل قبل از خود سبك تر شده و ربات را به بستري مناسب براي پژوهش هاي دانشگاهي تبديل كرده است.
در حالي كه سرعت متوسط ربات سورنا ۳ در هنگام راه رفتن برابر ۳/۰ كيلومتر بر ساعت است، ربات سورنا ۴ با كمك طراحي مسير ديناميكي و كنترلكننده هاي برخط، از قابليت راه رفتن پيوسته با سرعت ۷/۰ كيلومتر بر ساعت برخوردار است.
با استفاده از حسگرهاي تماسي نوين ساخته شده در مركز سيستم ها و فناوري هاي پيشرفته (CAST) دانشگاه تهران، ربات سورنا ۴ امكان راه رفتن روي سطوح ناهموار را علاوه بر سطوح صاف دارد.
نحوه كاركرد ربات سورنا ۴
براي بررسي و پياده سازي حركت هاي مختلف ربات از جمله گرفتن اشيا، حركت به جانب، عقب گرد، دور زدن، شوت زدن و بازيابي تعادل، از شبيه سازهاي Gazebo، Choreonoid و MATLABاستفاده شده است.
همچنين با افزايش فركانس حلقه كنترلي ربات نسل جديد به ۲۰۰ هرتز، امكان پياده سازي كنترلرها و تخمين گرهاي برخط روي ربات فراهم شده است. علاوه بر اين، با كمك ميان افزار سيستم عامل رباتيك (ROS)، امكان اجراي همزمان برنامه ها، پايش وضعيت ربات به صورت برخط و اجراي بلادرنگ الگوريتم ها براي ربات سورنا ۴ امكان پذير شده است.
يكي از اهداف اصلي پروژه سورنا ۴، ساخت رباتي با قابليت تعامل بيشتر با محيط اطراف و انسان بوده است. ربات جديد قابليت تشخيص چهره انسان و شمارش آن ها، تشخيص اشيا و يافتن موقعيت آن ها، تشخيص حركت انسان، تشخيص گفتار و پاسخ دادن به آن ها را داراست.
همچنين با تركيب حركات تمام تنه ربات و هوش مصنوعي، اين ربات قابليت گرفتن برخط اجسام، دنبال كردن چهره افراد و اشيا و تقليد حركات انسان را دارد.
 تاكسي هاي هوايي
تاكسي هاي هوايي درمان ستون فقرات
درمان ستون فقرات دستگاه شوك قلبي خودكار
دستگاه شوك قلبي خودكار توليد كنترل كننده هاي الكترونيكي
توليد كنترل كننده هاي الكترونيكي موسسات دانش بنيان سمنان
موسسات دانش بنيان سمنان همه چيز در مورد اسكن اسناد و داده ها
همه چيز در مورد اسكن اسناد و داده ها  دانش بنيان ها و تجهيزات آزمايشگاهي
دانش بنيان ها و تجهيزات آزمايشگاهي